绕线型感应电动机各阶段的控制原理以罐笼为例,分析各阶段电动机的控制原理。
加速阶段
加速阶段电动机的控制原理可用图8 - 3所示的方框图来说明。
电动机加速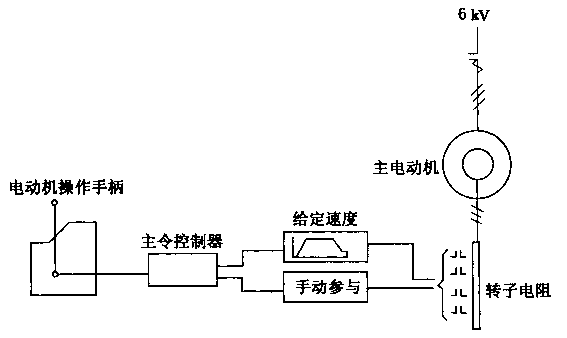 前,转子内串全部附加电阻。欲使提升机正转,司机可将电动机操 纵手柄自中性位置迅速推向前方极端位置,这时主令控制器的全部触头均闭合。利用已 按给定速度图、力图整定好的一系列继电器,配合接触器共同控制着附加电阻。当附加 电阻逐段适时地被切除时,电动机转速逐渐上升。经加速时间$后,附加电阻全部被切 除,电动机获得了额定转速。
前,转子内串全部附加电阻。欲使提升机正转,司机可将电动机操 纵手柄自中性位置迅速推向前方极端位置,这时主令控制器的全部触头均闭合。利用已 按给定速度图、力图整定好的一系列继电器,配合接触器共同控制着附加电阻。当附加 电阻逐段适时地被切除时,电动机转速逐渐上升。经加速时间$后,附加电阻全部被切 除,电动机获得了额定转速。
罐笼用于副井提升其他设备时,因速度图、力图不尽相同,这时可采用手动控制L 司机应根据具体情况适时前推操纵手柄,主令控制器触头的闭合情况,亦即切除电阻的 时机,这全决定于司机的控制。这种控制方式常称为手动参与,如图8 - 3所示。
为了更为清楚地说明正常情况下的加速控制过程,可以利用电动机的特性曲线来进 行分析。图8-4给出了交流绕线感应电动机转子附加五段电阻时的特性曲线。
图8-4中的横轴代表电动机力M,而M与卷筒圆周拖动力F成正比;纵轴代表 电动机转数n,而n与卷筒圆周速率v成正比。
电动机的自然特性曲线如图8-4所示,特性曲线有稳定部分和不稳定部分。为了 能够在稳定部分运转,加速时,转子可串附加电阻串电阻愈大,特性曲线愈软。
提升开始后,由于五段附加电阻全部串在转子回路内,电动机形成人工特性曲线 由于凡曲线所形成的拖动力尚小于提升至开始时的静阻力故提升机无法 加速。切除一段电阻后,电动机转入第二条特性曲线上运转。
电动机开始加速。随着n的升高,M逐渐减小。为了产生给定的加速度$$,必须在 M = 时继续切除一段电阻,电动机将沿特性曲线R3运转。如此重复,直至切除 全部电阻,电动机转入自然特性曲线R.运转为止。这个自动加速过程如图8-4中折线 图中1点的转速,近似等于电机转速。
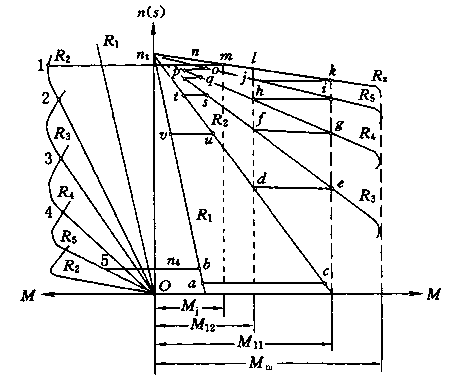
等速阶段在电动机的自然特性曲线阴点运转,相应的转速为n %。由于&特性曲线 硬,近于水平线,即或静阻力)稍有变化,转速也仍十分接近n%。等速阶段无需任何 控制。
减速阶段
减速阶段的控制方法与采用的减速方式有关。
1. 电动机减速方式
与加速阶段控制方法相仿,司机适时地将电动机操纵手柄逐渐移回至中性位置,各 段附加电阻逐级串入。工作过程如图8-4中的折线所示。
2. 机械制动减速方式
与采用自由滑行减速方式的控制方法有些相同。减速开始后,应迅速将电动机操纵 手柄移至中性位置。为了防止意外事故,另安有减速开关。司机未能及时移动手柄, 减速开关可自动将电动机自电网断开。
与采用自由滑行减速方式的不同点,在于电动机断电后应及时对提升机施以适当的 制动力。采用机械制动的制动过程如图8-5所示。
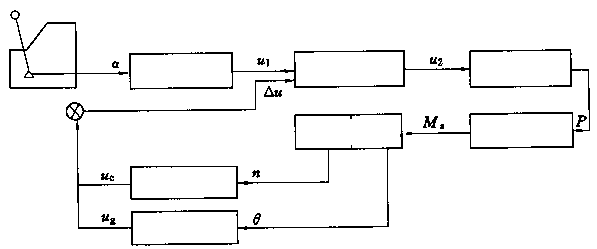
司机将工作制动手柄后移,通过自整角机,将工作制动手柄的角位移量。转化为 电信号24,经磁放大器进行综合、放大后,电信号被输送至电液调压装置中。电液调压装置将根据输入信号的大小,使制动器产生相应的制动力详见第三章。制动力的大小决定于司机移动制动手柄的角度。常称这种控制方式为手动参与,属于开环控制系统。
我国的电控系统也可实现自动投入工作制动。由图8-5所示的方框图可以看 出,利用旋转的卷筒,按照给定速度图设计出来的给定速度装置,必然反映了给定速度的 变化规律。一台小型直流发电机由提升电动机拖动,因此,它的电枢电压必然反映了提 升系统的实际速度。减速阶段的任一瞬间,两个速度都可进行比较。(实际速度大于给 定速度,通过磁放大器综合、放大,将产生与速度差成比例的制动力),从而保证提升机 自动按照给定速度图运转。这种在技术上十分先进的具有反馈的控制系统称为闭环控 制系统。
动力制动减速方式
首先简单介绍有关动力制动的物理概念。
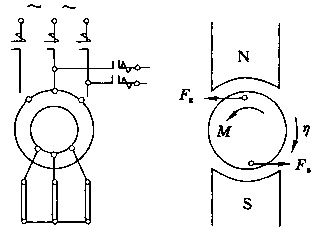
交流电动机与电源断开后,将其中两相改直流电。这时,电动机的定子不再产生 旋转磁场,而是形成一个静止的磁场,磁场方向如图8-6所示。减速阶段,由于惯性力 的作用,电动机转子以顺时针方向在上述磁场内旋转。从图8-6所示的情况可以看出, 这时转子导体内必有感应电流,电流方向如图所示。转子电流与磁场相互作用的结果, 必然形成制动力M,其制动力以"表示。正因为制动力的方向与转子旋转方向相 反,因此,提升电动机将逐渐减速直至停。
电动机处于动力制动状态运行时,经理论研究证明,特性曲线应处于M一n飞曲线 图中的第二象限,如图8-4所示。减速阶段开始后附加电阻全都接入,然后利用整定好 的继电器,再将附加电阻逐级切除,其工作过程如图8-4中的12345等线段所示。目前标准电控设备均采用带反馈的动力制动闭环控制系统,制动力的大小决定于实际速度和给定速度的偏差值。
采用动力制动减速方式时,附加电阻将增大,电能损失也将增大,故常称动力制动为 能耗制动。我国生产的可控硅整流动力制动设备性能良好,目前正在各矿推广使用。
爬行阶段
图8-4中的n$是与爬行速度"$相对应的电动机转速。一般来说,爬行阶段的拖 动力)M4都不很大。但是,专为验绳设计的第一条人工特性曲线,其!4点相应的拖动 力矩很小,往往小于M 4,而尺:特性曲线上与! 4相对应的拖动力矩往往又大于M %,为 此,只能轮流交替使用$ &、$ '两条特性曲线,时而减速,时而加速,使其平均力)与M 4 相当,平均速度与"4相当。我们称这种控制方式为脉动控制。当然,脉动控制是很不理 想的,不仅增加了电能损失,而且使控制复杂化。但采用脉动控制时,无需增添任何设备。效果良好且控制简便的方案是采用微机拖动,其工作原理如图8-7所示。
爬行阶段开始后,提升电动机3自电网断开。连接气囊离合器4,并启动微拖电动机
6.正确选用微拖减速器5的速比和微拖电动机的额定转速,可以在提升机卷筒1的圆 周处获得近于0.5m/s的速率。由于工作在微拖电动机的自然特性曲线上,爬行速度十 分稳定。微拖电动机容量不大,约为提升电动机容量的5%。
提升机的保护
为了防止提升机发生过速、过卷等意外事故,采用了不少保护设备。将保护设备有 机地联系在一起,形成了电控装置中的重要控制回路:安全回路。
安全回路中串有很多保护设备的触头,提升机工作不正常时,相应触头断开,安全接 触器线圈AC失电。这时,将发生下列情况:
(1 )电动机正反转回路中的AC常开触头断开(见图8-8),电动机正向(或反向) 触器ZC(或FC)失电,电动机自电网断开(图8-8)。
(2)由图8-8可以看出,由于AC触头断开,安全制动电磁铁回路中的电磁铁3G失电,因而产生安全制动。
安全回路中共串有下列保护设备的触头:
LK-1:主令控制器触头。当电动机操纵手柄位于中性位置时,该触头闭合。(某次提升过程中发生安全制动,为防止事故解除后提升机自动运行,应保证提升机只有在断 电状态下才能解除安全制动。这就是在安全回路中串)LK— 1触头的目的。提升机正 常运行时,用AC自保触头短接LK—1,维持AC通电。
DZK:工作制动手柄闭锁开关的触头。当工作制动手柄位于制动位置时,该触头闭 合。(某次提升过程中发生安全制动,为防止事故解除后在容器、钢丝绳等重力作用下 提升机自动运行,应保证提升机只能在工作制动状态下才能解除安全制动。这就是在安全回路中串)该触头的目的。提升机正常运转时,用AC自保触头短接DZK,维持AC通 电。
CDJ及!8:CDJ为测速回路断线检视继电器的触头,C8为控制最后一段启动电阻的 接触器的触头。反映实际速度的测速回路断线,无法实现过速自动保护时,CDJ线圈 失电,AC失电,产生安全制动。但在提升机正常运转时,由于速度过低,测速回路电压也 过低,以致CDJ不能很好吸持。为了维特AC回路仍能通电,用8C常闭触头短接CDJ。 当速度增大时,八段电阻已全部切除,8C接触器有电,CDJ可投入工作。
GS:等速阶段过速继电器触头。当提升机实际速度超过#O的15%时,GS常闭 触头断开,AC失电。
3GSJ:减速阶段过速继电器触头。当减速阶段任意瞬间实际速度超过给定速度10% 时,常开触头3GSJ断开,AC失电。
"1 :制动油压过保护继电器触头。制动系统油压过高时,"i断电,AC失电。
SYJ:动力制动失压继电器触头。一套过卷开关安装在地面高于正常卸载位置1.5m 处的地方;另一套安装在深度指示器相应位置。容器过卷时,AC失电,产生安全制动。
F $-3-4 ,F $-5-6 ;过卷复位开关触头。复位开关安装在司机操纵台上。发生过卷 产生安全制动后,若欲下放已过卷的容器,必须首先解除安全制动,才能启动提升机。这 时司机搬动复位开关,使复位开关的触头暂时短接已断开的过卷开关触头,使AC成为通 路。
在控制电动机正反转回路内的过卷复位开关触头F $-1-2!和F $-8-8在提升机正常工作时,都是闭合的。若提升机正转时容器过卷,必然是过卷开关JXK,和JXK,起 作用。利用复位开关短接上述触头时,应该令F!_&_6触头闭合。在F!_&_6闭合的同 时,串)在电动机反向接触器FC回路中的复位开关触头F !_7_8也闭合;而电动机正向 接触器ZC回路中的复位开关触头F !亠-却断开。这种设计方式,保证正向过卷后只 能反向开车,避免由于司机误操作而引起重大事故。
JX KI, JX K-:闸瓦磨损开关的触头。闸瓦磨损严重时,触头断开,产生安全制动。
GDL:高压油开关触头。电动机主回路过流、欠压时,GDL断开,AC失电。
3SLJ:失流保护继电器触头。线圈在深度指示器电气线路中。深度指示器电控 制系统断线,则该触头延时断开,产生安全制动。
下面简单介绍一下电气控制线路图中各符号代表的意义。
凡是末尾符号为J的,代表继电器。如GSJ代表过速继电器。继电器线圈以“□”表 示;常开触头以N表示;常闭触头以 匕 表示。所谓常开触头是指线圈失电时,触头状 态是断开的;线圈失电时,凡触头呈闭合状态的,称之为常闭触头。很明显,(线圈通电, 则常开触头呈闭合状态,而常闭触头呈断开状态。
凡末尾符号为C的,代表接触器。如AC是安全制动接触器。线圈以“□”表示;常开 触头以」L表示;常闭触头以卄表示。触头通断情况向继电器。
凡末尾符号为K的,代表开关。JXKI代表闸瓦磨损开关。常开触头以综二表示;常闭触头以卄表示。触动开关,则常开触头闭合,常闭触头打开。
免责声明:矿库网文章内容来源于网络,为了传递信息,我们转载部分内容,尊重原作者的版权。所有转载文章仅用于学习和交流之目的,并非商业用途。如有侵权,请及时联系我们删除。感谢您的理解与支持。